Research and Development Philosophy of Angel Suit H10: Lightweight Adaptive Hip Assistance
Angel Suit H10 is a wearable robot designed to assist flexion and extension of the hip joints. In contrast to the WalkON Suit F1, which focuses on enabling independent walking and versatile terrain locomotion for individuals with complete spinal cord injury, H10 prioritizes lightweight design, ease of use, and applicability in practical rehabilitation and training environments. By minimizing the mass and volume of the system and adopting a waist-belt structure with wide support pads, H10 is designed to remain minimally perceptible to the wearer while enabling repetitive gait training in environments that closely resemble daily life.
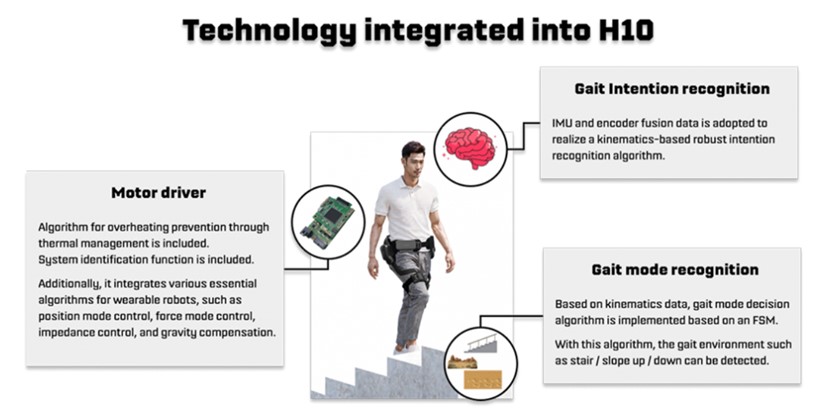
Angel Suit H10 consists of hip-assist actuators, sensor modules that measure the wearer’s motion in real time, and control algorithms for motion intention estimation and assistive torque generation. Using joint angle and angular velocity information obtained from high-resolution encoders and inertial sensors, the controller estimates the wearer’s flexion and extension intention across gait events and independently delivers assistive torques of up to approximately 15 Nm to each hip joint. The control strategy emphasizes adaptive assistance by selectively compensating for insufficient joint torque while avoiding interference with the wearer’s voluntary muscle activity.